


Scanner móvel, como obter precisão de 6mm (ou melhor)

Scanner móvel
Atualmente sistemas de escaneamento móvel são rápidos, escaláveis, e capazes de criar nuvens de pontos de alta qualidade e com precisão suficiente para atender a demanda da maioria dos projetos.
NOTA DO EDITOR: A informação abaixo foi retirada do webinar sobre alta precisão com scanners móveis. Para maiores informações sobre os tópicos abordados aqui, assista ao webinar no link https://www.navvis.com/resources/webinars/meet-project-requirements
É de conhecimento comum que scanners móveis podem acelerar o fluxo de captura de dados e expandir seus negócios. O que você não deve saber é que os melhores sistemas atuais produzem nuvens de pontos extremamente precisas e capazes de atender a demanda de projetos de documentação.
Mostraremos como. Aqui uma breve revisão de como é possível alcançar a precisão de 6 mm (ou melhor) com o scanner móvel.
Melhores práticas no escaneamento móvel
Como esses dispositivos são capazes de capturar nuvem de pontos enquanto o operador caminha, são sujeitos a pequenos erros que podem degradar a qualidade da nuvem de pontos. Felizmente, scanners móveis atuais possuem características que corrigem esses erros e garantem maior possibilidade de precisão.
Circuitos fechados
Essa característica é padrão em praticamente todos os sistemas e geralmente é o necessário para garantir precisão em pequenos escaneamentos.
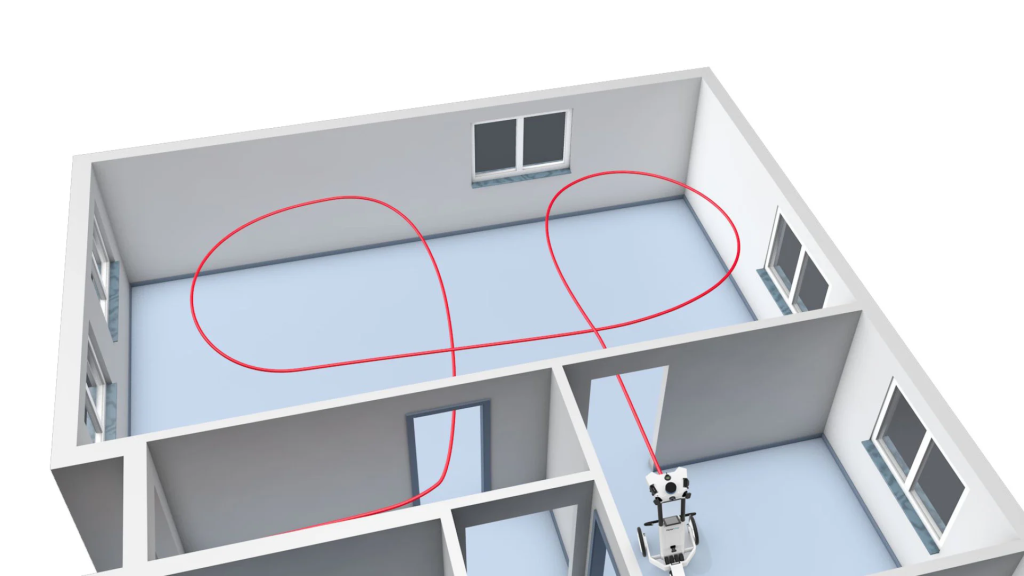
Para utilizar o fechamento de circuito, retorne ao ponto de partida do escaneamento. O algoritmo SLAM (Simultaneos Localization and Mapping) reconhecerá essa localização e automaticamente otimizará a nuvem de pontos para corrigir erros e melhorar a precisão.
Otimização por Pontos de Controle
Somente os lasers scanners móveis mais avançados do mercado oferecem essa característica.
A otimização por pontos de controle é opcional para a maioria dos escaneamentos, uma vez que é possível obter alta precisão em projetos menores com bons fechamentos de circuitos. Os pontos de controle são essenciais ao escanear grandes áreas, pois corrige os erros de arrasto que tendem a ocorrer em nuvens de pontos maiores.
Fornecedores implementam essa funcionalidade de diferentes formas. Para utilizar a otimização por pontos de controle com o NavVis, adicione pontos de controle pelo local do escaneamento e colete suas respectivas coordenadas. Ao escanear, capture os mesmos pontos de controle com o laser scanner. Durante o pós-processamento, informe as coordenadas para cada ponto de controle, e o software usará essa informação para otimizar a nuvem de pontos e melhorar sua precisão.
Comprovação em campo
Agora demonstraremos o ganho de precisão que pode ser esperado a partir do fechamento de circuitos e da otimização por pontos de controle. Para isso, analisaremos dois testes de campo realizados pela NavVis com o NavVis VLX.
Escaneamento pequeno com fechamento de circuito
Para o primeiro teste, a equipe da NavVis escaneou a seção de um escritório.
Foi selecionado esse tipo de ambiente devidos suas características: uma combinação de salas e corredores, que são um desafio para scanners móveis. (em outras palavras, era grande a probabilidade de erros que demandassem correções). Como o escaneamento era pequeno, a equipa optou por usar o fechamento de circuitos – sem pontos de controle – para otimizar a nuvem de pontos e eliminar erros.
- Área: 460 metros quadrados
- Tempo de escaneamento: 30 minutos
- Pontos de Controle: 0
Para obter mais informações, a NavVis realizar um levantamento do escritório com estação total. A equipe realizou a medição de distâncias manualmente e as comparou com as medidas das mesmas distâncias realizadas sobre a nuvem de pontos.
Os resultados? O fechamento de circuitos se provou eficaz na correção de erros em pequenos escaneamentos.
- 22 das 24 medições estavam dentro da diferença de 5 mm quando comparadas com as medições da estação total
- A outras duas medições estavam no intervalo entre 6 e 10 mm de diferença
Escaneamento grande com pontos de controle
Para o próximo teste, a equipe NavVis escaneou um estacionamento garagem.
Como o local selecionado era muito grande, era esperado que a nuvem de pontos final exibisse alguns erros de arrasto. Para corrigir esses erros, foi usada a combinação do fechamento de circuitos e otimização por pontos de controle.
- Área: 1500 metros quadrados
- Tempo de escaneamento: 20 minutos
- Pontos de Controle: 8
A equipe otimizou os dados de duas formas: uma usando apenas o fechamento de circuito e outra usando o fechamento de circuito e pontos de controle. No final, compararam os dois conjuntos de dados com escaneamento realizados por scanner terrestre realizado por outra equipe.
Os resultados? A otimização por pontos de controle forneceu uma redução de erro de arrasto muito efetiva.
- Fechamento de circuito: 8 mm de precisão absoluta
- Fechamento de circuito e otimização por pontos de controle: 6 mm de precisão absoluta
Conclusão
Analisando os dados mostrados acima, fica claro que fechamentos de circuitos e otimização por pontos de controle ajudam a produzir nuvens de pontos muito mais precisas.
Ainda não se convenceu? Essa notícia é apenas uma visão geral dos testes que a NavVis realizou para verificar a eficácia na correção de erros e avaliar a precisão de seu scanner móvel em diferentes ambientes. Para maiores informações sobre o teste – e um aprofundamento nos números alcançados – confira a gravação do webinar no link https://www.navvis.com/resources/webinars/meet-project-requirements
Texto traduzido de https://www.navvis.com/blog/how-to-get-6mm-accuracy-or-better-with-a-mobile-scanner



