



Desbloqueando o mapeamento aéreo e a coleta de dados: aprimore suas operações com o poder e a precisão da tecnologia LiDAR da DJI.
No atual cenário tecnológico de rápido avanço, o LiDAR destaca-se como uma ferramenta fundamental para diversas aplicações, desde a gestão florestal até à inspeção de infraestruturas. Mergulhe no mundo do LiDAR com o guia completo da DJI Enterprise. Dos princípios fundamentais às aplicações do mundo real, este blog fornece aos leitores conhecimentos essenciais sobre a tecnologia LiDAR e seu potencial transformador.
Introdução e Princípios da Tecnologia LiDAR
O que é LiDAR?
LiDAR, que significa Light Detection and Ranging, é uma tecnologia de sensoriamento remoto que usa pulsos rápidos de laser para mapear a superfície do alvo. Ao enviar um feixe de laser e medir o tempo que a luz leva para refletir de volta nos objetos, o LiDAR cria mapas de pontos tridimensionais detalhados.
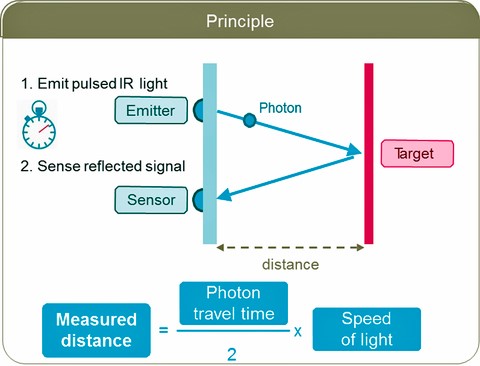
Imagine que você está em um quarto completamente escuro com uma lanterna. Se você apontar a lanterna para vários objetos, a luz retornará e, ao ver essa luz, você poderá ter uma ideia de onde as coisas estão e a que distância elas estão. Quanto mais vezes você acender a luz e de diferentes ângulos, melhor terá a ideia do layout da sala. O LiDAR funciona de forma semelhante, mas em vez de usar luz visível como uma lanterna, ele usa luz laser invisível. Veja como funciona:
1-Emissão: o dispositivo LiDAR envia um pulso rápido de luz laser em direção a um objeto.
2-Reflexão: A luz então reflete no objeto e retorna ao sensor LiDAR.
3-Detecção: O dispositivo mede o tempo que a luz levou para retornar. Como a velocidade da luz é constante, esse tempo de duração pode ser usado para calcular a distância entre o sensor LiDAR e o objeto alvo.
LiDAR vs. Fotogrametria
O sistema LiDAR mede os dados, enquanto o sistema de fotogrametria os calcula. Essa diferença fundamental os torna mais adequados para diferentes aplicações. O LiDAR usa pulsos de laser para medir a realidade, tornando-o ideal para aplicações que exigem certeza absoluta dos dados. O LiDAR pode penetrar na vegetação e não é afetado pelas condições de iluminação, sendo uma ótima opção para mapear florestas ou outras áreas com densa cobertura vegetal. LiDAR também é útil para criar modelos de terreno e mapas topográficos precisos.
A fotogrametria usa câmeras para capturar imagens sobrepostas de uma área, que são então costuradas para criar um modelo 3D ou mapa orto. É mais barato que o LiDAR e pode ser usado com hardware disponível no mercado, como qualquer drone e câmera. Isso o torna útil para a criação de modelos altamente detalhados de edifícios e infraestrutura, bem como ortomapas de alta resolução para aplicações de inspeção e monitoramento.
Aspecto | Fotogrametria | LiDAR |
Definição | Técnica de obtenção de medidas e modelos 3D a partir de fotografias. | Um método de sensoriamento remoto que utiliza luz laser para medir distâncias e gerar modelos 3D precisos da superfície da Terra. |
Acurácia | Alta precisão em condições bem iluminadas e claras após aplicação de GCPs ou RTK. | A precisão depende do estado inicial do POS e não depende das condições de iluminação. |
|
| |
Definição | Técnica de obtenção de medidas e modelos 3D a partir de fotografias. | Um método de sensoriamento remoto que utiliza luz laser para medir distâncias e gerar modelos 3D precisos da superfície da Terra. |
Acurácia | Alta precisão em condições bem iluminadas e claras após aplicação de GCPs ou RTK. | A precisão depende do estado inicial do POS e não depende das condições de iluminação. |
Custo | Custo geralmente mais baixo, mais acessível para projetos de pequena escala. | Custo mais elevado devido a equipamentos sofisticados e requisitos de processamento. |
Manuseio de terreno | Apresenta bom desempenho em ambientes urbanos e paisagens claras. | Excelente em diversos terrenos, incluindo vegetação densa e paisagens urbanas. |
Processamento de dados | Processamento demorado, especialmente para grandes conjuntos de dados. | O processamento é mais rápido porque os dados são capturados nativamente em formato de coordenadas espaciais. |
Condições de luz | Requer boa iluminação para melhores resultados. | Eficaz em quaisquer condições de iluminação, inclusive à noite. |
Penetração Vegetal | Luta com vegetação densa. | Capaz de penetrar em vegetação densa para chegar ao solo. |
Dependência Meteorológica | O desempenho pode ser afetado por condições climáticas, como nuvens e chuva. | Menos afetado pelas condições climáticas. |
Resolução espacial | Alta resolução espacial para detalhes de superfície. | Menor resolução espacial em comparação com a fotogrametria. |
Aplicativo | Ideal para documentação de patrimônio cultural, mapeamento em pequena escala e arquitetura. | Mais adequado para mapeamento topográfico em grande escala, silvicultura e planejamento urbano. |
Quais são os Componentes de um Sistema LiDAR Aerotransportado Integrado?
Componentes de Hardware – Sistema LiDAR:
Módulo LiDAR: O componente mais importante do sistema LiDAR, o módulo laser, gera um feixe de laser pulsado direcionado à superfície do alvo. Composto por diversos elementos, incluindo fonte de luz laser, receptor, componentes ópticos e controlador eletrônico.
Fonte de Luz Laser: Gera pulsos curtos de luz laser usados para medir a distância entre o sensor LiDAR e objetos no ambiente.
Receptor: Detecta a luz laser refletida, convertendo-a em um sinal eletrônico processado pelo sistema LiDAR.
Componentes Ópticos: Responsáveis por direcionar e focar o feixe de laser na superfície alvo e coletar a luz refletida.
Controlador Eletrônico: Gerencia o tempo e a duração dos pulsos de laser, processando os sinais do receptor.
O receptor GNSS (Global Navigation Satellite System) proporciona georreferenciamento preciso para resultados LiDAR digitalizados. A maioria dos sistemas UAV LiDAR utiliza seu próprio sistema GNSS individual para registrar dados de satélite, sendo integrados ao DJI PSDK e usando o sistema GNSS do drone.
IMU (Inertial Measurement Unit): Mede aceleração e taxa angular de um sistema LiDAR, determinando posição, velocidade e atitude ao longo do tempo para corrigir movimentos durante a coleta de dados.
INS (Sistema de Navegação Inercial): Usa dados brutos de uma IMU e os integra com informações de posicionamento GNSS, fornecendo uma estimativa contínua de posição e orientação do sensor LiDAR durante a captura de dados.
Sistema UAV:
UAV, ou veículo aéreo não tripulado, é usado para voar o sistema LiDAR sobre a área pesquisada, podendo ser equipado com seu próprio sistema GNSS e RTK/PPK para georreferenciamento preciso.
Componentes de Software:
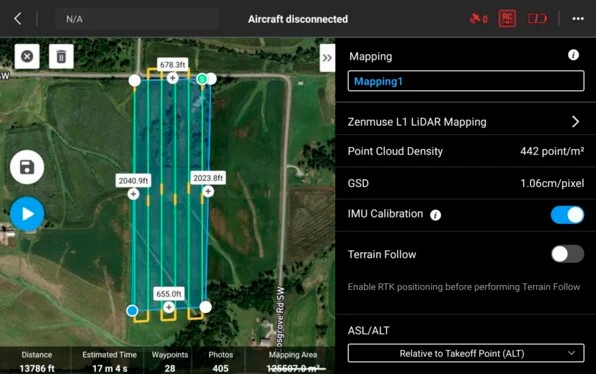
Software de Planejamento de Missão de Voo: Planeja a trajetória de voo do drone com LiDAR, permitindo ao usuário definir uma área e gerar uma rota de voo autônomo baseada em waypoints.
Software de Monitoramento e Controle de Voo: Permite ao usuário monitorar em tempo real a trajetória de voo e o status do sistema UAV e LiDAR, exibindo parâmetros como altitude, velocidade e nível de bateria.
Software Raw Point Cloud Processing: Processa dados brutos LiDAR, gerando-os em formato manipulável, como LAS/LAZ, para uso posterior.
Software de Processamento de Nuvem de Pontos: Manipula e analisa dados de nuvem de pontos para diversas aplicações, como criação de desenhos, medições e extração de superfícies, classificação e muito mais.

Principais Terminologias e Conhecimentos
Reflexividade da Superfície do Objeto
-Diferentes superfícies de objetos apresentam taxas variadas de refletividade.
-A maioria das superfícies possui uma refletividade acima de 10%.
– É importante observar que a água atua como um absorvente forte, e um laser LiDAR comum com comprimento de onda de 905 nm será diretamente absorvido. A menos que o LiDAR seja do tipo batimétrico e utilize um comprimento de onda menor, ele não conseguirá penetrar na água.
Aqui estão alguns exemplos de taxas de refletividade de superfície:
-Asfalto fresco: 4-7%
-Grama seca: 15-20%
-Dossel da floresta: 5-20%
-Concreto úmido: 30-50%
-Neve: 60-90%
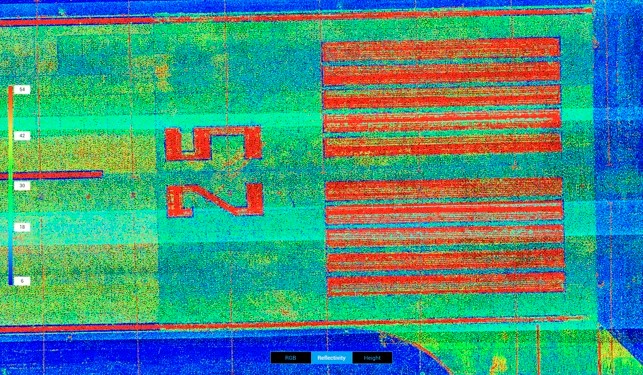
Nuvem de pontos colorida pela base na refletividade da superfície (vermelho é alto, azul é baixo)
Métodos de Digitalização LiDAR
Ao alterar o método de rotação dentro do sensor LiDAR, o sistema pode atingir dois modos de varredura mecânica diferentes: varredura repetitiva e varredura não repetitiva.
Método de Digitalização Repetitiva
A varredura repetitiva cobre apenas o Campo de Visão Horizontal (FOV) (70,4°×4,5°).
Vantagem: No mapeamento móvel, os objetos são escaneados apenas por um curto período, pois o desvio da precisão da navegação inercial é pequeno em um curto intervalo, resultando em um modelo mais preciso.
Desvantagem: O FOV vertical é bastante limitado, com poucas informações sobre a superfície vertical. Se forem necessárias informações verticais, é preciso planejar pelo menos duas trajetórias de voo para compensar a perda de FOV vertical.
Aplicação: Indicado para cenários com terreno relativamente suave e requisitos de alta precisão, como medição de terreno, geração geral de Modelos de Elevação Digital (DEM/DSM).
Recomenda-se o uso de varredura repetitiva em levantamentos para garantir a precisão da nuvem de pontos.
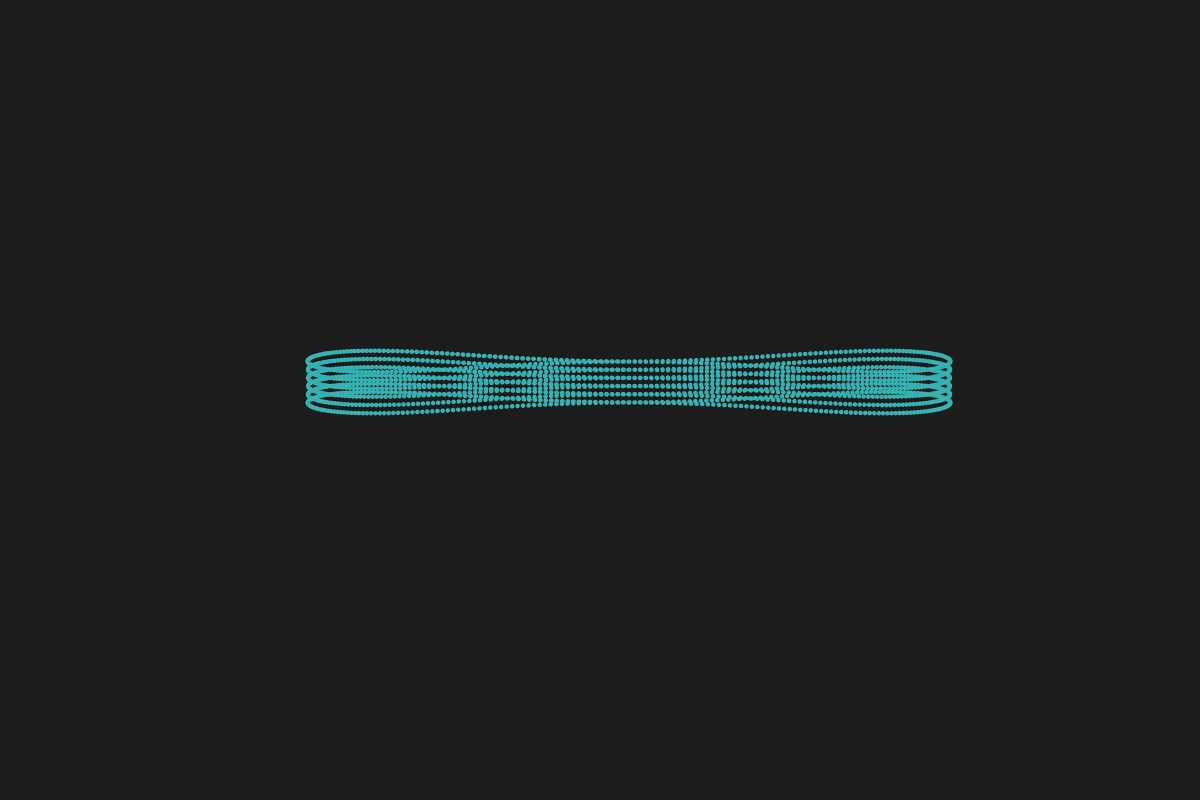
Imagem varredura repetitiva
Método de Digitalização Não Repetitivo
A varredura não repetitiva pode cobrir rapidamente todo o Campo de Visão (FOV) (70,4°×77,2°).
Vantagens: Fornece cobertura total do FOV, pode realizar varredura vertical e obter boas informações verticais a partir de uma única varredura sem definir um ângulo de gimbal.
Desvantagem: No mapeamento móvel, os objetos são escaneados em diferentes posições e momentos, contando com uma precisão de navegação inercial consistente. Se a precisão da navegação inercial variar ao longo do tempo, a precisão do modelo diminuirá. Isso resulta em objetos desfocados ou duplicados, nuvens de pontos mais espessas e fios mais grossos. Este efeito é particularmente pronunciado em varreduras não repetitivas, que possuem um campo de visão maior.
Aplicação: Adequado para cenários com requisitos de precisão relativamente baixos, requisitos de alta eficiência e requisitos completos de informações de elevação, como modelagem 3D urbana, modelagem de estrutura tridimensional complexa, inspeção de linhas de energia, mapeamento rápido de emergência, etc.
No cenário de inspeção de linha de energia, caso seja escolhido o voo de linha única, recomenda-se a utilização do método de varredura não repetitiva.
Comprimento de Onda
Os sistemas LiDAR utilizam lasers para emitir pulsos de luz, sendo que o comprimento de onda do laser determina as características do pulso. Esse comprimento de onda afeta a capacidade do sistema LiDAR de penetrar em diferentes materiais e nos tipos de reflexos que pode detectar. Abaixo estão dois tipos comuns de LiDAR e suas faixas correspondentes de comprimento de onda.
LiDAR de Infravermelho Próximo (NIR): normalmente utiliza lasers com comprimentos de onda entre 800 e 1.000 nanômetros. São ideais para a penetração na vegetação e detecção de múltiplos retornos a partir de um único pulso, sendo aplicáveis em atividades florestais. No entanto, não conseguem penetrar na água, tornando-os inadequados para aplicações batimétricas.
LiDAR Batimétrico: utiliza comprimentos de onda mais curtos, no espectro verde e azul, para penetrar na água e medir a profundidade do fundo do mar. O laser verde, com comprimento de onda de 532 nm, é comumente usado para LiDAR batimétrico, enquanto o laser azul, com comprimento de onda de 445 nm, é empregado em alguns sistemas para condições de águas claras. São utilizados em mapeamento do fundo do mar, gestão de zonas costeiras e inspeção de infraestrutura subaquática.
Faixa de Detecção
A faixa de detecção refere-se à distância máxima em que um sistema LiDAR pode detectar e medir objetos com precisão. Diversos fatores, como a potência e o comprimento de onda do laser, a sensibilidade do receptor e a refletividade dos objetos escaneados, afetam essa capacidade. Geralmente, a especificação do intervalo de detecção é fornecida com a refletividade da superfície alvo ou condições ambientais como referência.
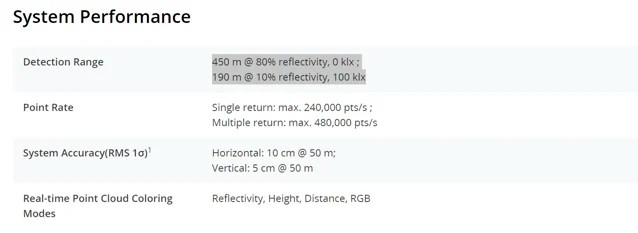
Vale ressaltar que o alcance máximo de detecção especificado pelos fabricantes de LiDAR é geralmente testado com base em uma reflexividade de 90%, o que não é significativo para uso prático. A distância de detecção a uma reflexividade de 10% tem um significado mais prático, uma vez que se aplica à maioria das superfícies.
Um alcance de detecção mais longo é desejável para sistemas LiDAR, pois permite uma maior área de cobertura e coleta de dados mais abrangente.
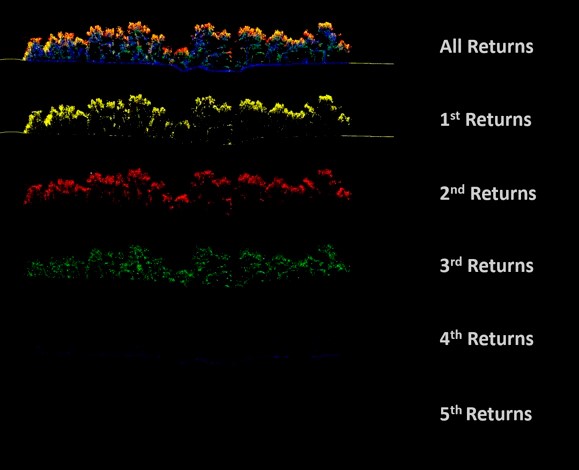
Múltiplas Retornos
O laser em um sistema LiDAR emite pulsos que, ao atingirem obstáculos, refletem de volta. Como a luz não é totalmente bloqueada, ela continua a retornar, criando a impressão de que o LiDAR pode “ver através” da vegetação. Na realidade, o LiDAR detecta o solo e a copa das árvores ao olhar através das lacunas entre as folhas.
Primeiro Retorno: É o primeiro reflexo capturado pelo sensor, geralmente do objeto mais alto no caminho do pulso de laser, como copas de árvores ou topos de edifícios.
Retornos Intermediários: São reflexos de objetos entre o objeto mais alto e o solo, como galhos ou janelas.
Último Retorno: Geralmente é o reflexo do solo ou da base de um objeto.
A chuva ou a poluição atmosférica podem causar interferência e ruído nos dados LiDAR. Nessas situações, é aconselhável utilizar o “retorno único” mais forte.
Aplicativos Relacionados
A capacidade de detectar múltiplos retornos permite uma compreensão mais detalhada do objeto. Por exemplo:
Extração de Vegetação: Segmentação de plantas individuais, contagem, cálculo de biomassa e análise de parâmetros de vegetação.
Mapeamento Topográfico: Extração de DEM (Modelo Digital de Elevação) do DSM (Modelo Digital de Superfície) para análise de terreno.
Modelagem de Linhas de Energia: As linhas de energia geralmente se sobrepõem, e a capacidade de retorno múltiplo pode medir múltiplas camadas de fios de uma só vez, reduzindo a perda de dados devido a obstruções.
Divergência de Feixe
A divergência do feixe refere-se ao espalhamento ou alargamento de um feixe de laser ao longo da distância. Representa o ângulo no qual o feixe de laser se espalha à medida que viaja do sensor LiDAR e se afasta de seu ponto de origem.
Essencialmente, uma divergência de feixe menor significa que o laser permanece mais focado em distâncias maiores, enquanto uma divergência de feixe maior significa que o laser se espalhará mais à medida que viaja.
Impacto na Penetração do Dossel
Em ambientes como florestas, uma divergência de feixe menor (feixe mais focado) é normalmente mais eficaz para penetrar na copa e atingir o solo abaixo. Isso ocorre porque um feixe de laser mais concentrado pode encontrar mais facilmente lacunas entre folhas e galhos, resultando em melhor detecção do ponto no solo. Por outro lado, um laser com maior divergência de feixe pode espalhar-se mais pela copa e pode não atingir o solo da floresta de forma tão eficaz.
Impacto na Densidade e Resolução de Pontos
Embora um feixe mais focado (menor divergência) possa fornecer resultados mais precisos e de maior resolução, um feixe com maior divergência pode cobrir uma área maior com cada pulso, levando a uma densidade de pontos e resolução potencialmente mais baixas no alvo.
Impacto no Alcance e na Distribuição de Energia
Lasers com menor divergência de feixe mantêm sua concentração de energia em distâncias maiores. Isso é crucial para sistemas LiDAR que precisam operar em longas distâncias. À medida que o feixe diverge mais, a energia se espalha por uma área maior, diminuindo potencialmente a força do sinal de retorno, especialmente em distâncias mais longas.
Interação Atmosférica
A divergência do feixe também pode desempenhar um papel na forma como o laser interage com partículas na atmosfera, como poeira, neblina ou chuva. Um feixe de laser com maior divergência pode espalhar mais devido às interações com essas partículas, o que pode reduzir o alcance efetivo e a precisão do sistema LiDAR em determinadas condições.
Taxa de Amostragem
A taxa de amostragem refere-se ao número de pontos coletados por um sistema LiDAR em um determinado período, medido em hertz (Hz). Uma taxa de amostragem mais alta significa que mais pontos são coletados por segundo, resultando em uma nuvem de pontos mais densa.
No entanto, uma taxa de amostragem mais alta também significa que mais dados estão sendo coletados, o que pode levar a arquivos maiores e tempos de pós-processamento mais longos. Portanto, a taxa de amostragem de um sistema LiDAR deve ser cuidadosamente escolhida com base nas necessidades específicas de densidade do projeto.
É importante notar que a taxa de amostragem por si só não determina a precisão dos dados LiDAR. Outros fatores, como a divergência do feixe de laser e a precisão da IMU e do GPS, também desempenham um papel significativo na determinação da precisão dos dados.
Calibração IMU
A precisão do LiDAR está intimamente ligada à precisão do IMU. Quando um drone voa a um ritmo constante, a IMU pode perder a sua precisão. Consequentemente, a maioria dos sistemas LiDAR aerotransportados requerem calibração IMU antes, durante e depois do voo. Se a IMU não for calibrada, isso pode resultar em dados imprecisos, afetando análises e aplicações subsequentes que dependem dos dados LiDAR.
Existem dois métodos comuns para calibrar o IMU durante o voo do drone: as calibrações “figura-oito” e “acelerar-desacelerar”. Os métodos de calibração manual e automático fornecem os mesmos resultados.
O sistema LiDAR integrado da DJI usa o método de calibração “acelerar-desacelerar”, e o processo de calibração IMU é automaticamente integrado ao operar qualquer voo de missão. Ao pilotar o sistema DJI LiDAR manualmente, o aplicativo DJI Pilot lembrará o usuário de recalibrar o IMU após um período de voo.
Fatores que Afetam o Desempenho
A eficiência e a taxa de penetração podem ser afetadas por vários fatores na tecnologia LiDAR. A divergência do feixe e os retornos múltiplos desempenham um papel na penetração, enquanto a calibração da IMU afeta a precisão. O alinhamento das faixas afeta a precisão e diferentes métodos de digitalização afetam a cobertura e a densidade da digitalização vertical. A velocidade do voo e a taxa de amostragem também impactam a densidade.
Fatores que Afetam a Densidade:
Taxa de Amostragem: Uma frequência de repetição de pulso ou taxa de amostragem mais alta pode resultar em uma densidade de pontos mais alta, assumindo que outros fatores como velocidade de vôo e altitude permaneçam constantes.
Altitude de Vôo: Voar em uma altitude mais baixa geralmente resulta em maior densidade de pontos porque os pulsos de laser ocupam menos espaço no solo.
Sobreposição: Levantamento com linhas de voo sobrepostas pode aumentar a densidade de pontos nas regiões sobrepostas.
Terreno e Vegetação: Características como florestas densas podem resultar em múltiplos retornos de um único pulso de laser, aumentando potencialmente a densidade efetiva nessas áreas.
Velocidade de Voo: Uma velocidade de voo mais lenta permite uma densidade de pontos mais alta, pois o sensor LiDAR tem mais tempo para enviar pulsos de laser e detectar seus retornos.
Processamento de Dados LiDAR Brutos
Densidade da Nuvem de Pontos
A densidade descreve o número de pontos LiDAR coletados por unidade de área, muitas vezes expressa como pontos por metro quadrado (pts/m^2). Por exemplo, uma densidade de 10 pts/m^2 significa que, em média, existem 10 pontos de retorno LiDAR em cada metro quadrado da área pesquisada.
Diferentes Indústrias Verticais Têm Requisitos Variados para Densidade de Nuvem de Pontos:
Topografia e Mapeamento: Para mapas em escala 1:500, a densidade de nuvem de pontos necessária é ≥16 pontos/metro quadrado.
Inspeção de Linhas de Energia: Para análise detalhada de barreiras de árvores ou inspeções completas, as linhas de transmissão geralmente exigem pelo menos 25 pontos/metro quadrado. Algumas especificações exigem densidades ainda melhores, normalmente variando de 50 a 250 pontos/metro quadrado.
Levantamento Florestal: Uma densidade de nuvem de pontos de pelo menos 20 pontos/metro quadrado é necessária para atender às demandas de segmentação de árvores individuais.
O software de processamento de nuvem de pontos brutos geralmente também possui um recurso para ajustar a densidade do ponto
Verificação de Precisão de Elevação LiDAR
Verificar a precisão dos dados LiDAR usando pontos de verificação de elevação é um método comum para garantir que os modelos digitais de elevação (DEMs) ou modelos digitais de terreno (DTMs) derivados sejam representações precisas do solo.
Princípios para Configurar Pontos de Verificação de Elevação:
Os pontos de verificação devem ser distribuídos uniformemente e posicionados de forma visível.
Evite colocá-los em áreas onde as faixas de vôo se sobrepõem ou onde haja mudanças repentinas de elevação.
Os pontos de verificação devem estar situados em superfícies expostas e planas.
A referência de elevação para os pontos de verificação deve corresponder à referência de elevação da nuvem de pontos laser.
Diretrizes para Pontos de Verificação de Elevação:
Espalhe os pontos de verificação uniformemente em locais claros.
Não os coloque onde as trajetórias de voo se cruzam ou onde o nível do solo muda rapidamente.
Eles devem estar em terreno aberto e nivelado.
Certifique-se de que a altura deles corresponda à altura usada nos dados LiDAR.
Formato de Nuvem de Pontos LAS
O formato LAS foi desenvolvido pela Sociedade Americana de Fotogrametria e Sensoriamento Remoto (ASPRS) para permitir a troca de dados de nuvens de pontos LiDAR entre diferentes empresas e agências. O formato LAS é um formato de arquivo padronizado para armazenamento e troca de dados de nuvem de pontos LiDAR, contendo informações sobre a localização, intensidade, classificação e outros atributos de cada ponto. É também o resultado final dos sistemas DJI LiDAR.
O formato LAS para dados de nuvem de pontos inclui informações como coordenadas tridimensionais de pontos, cores RGB, refletância, tempo de GPS, número de retornos e qual retorno é um ponto.
O versionamento de arquivos LAS pode ser um problema ao tentar ler ou gravar um arquivo. É importante garantir que a versão do arquivo LAS usada seja compatível com o software de terceiros usado para processá-lo. Alguns softwares de terceiros podem não conseguir ler ou gravar certas versões de arquivos LAS. Se surgir um problema de compatibilidade, pode ser necessário usar uma versão diferente do arquivo LAS ou encontrar um software de terceiros diferente que suporte a versão que está sendo usada. DJI Terra exporta os dados da nuvem de pontos LiDAR no formato LAS versão 1.2, que é uma versão altamente compatível do arquivo LAS.
Colorização de Nuvem de Pontos
Nuvens de pontos coloridos podem fornecer contexto adicional aos usuários, facilitando a interpretação e compreensão dos dados. Por exemplo, um edifício e uma árvore podem ter formas estruturais semelhantes em certos aspectos, mas a cor pode diferenciá-los instantaneamente.
A maioria dos sistemas LiDAR aéreos são equipados com câmeras RGB que capturam imagens de alta resolução simultaneamente com a coleta de dados LiDAR. Essas imagens podem então ser usadas para atribuir valores de cores aos pontos LiDAR correspondentes.
Benefícios da Colorização:
Apelo Visual: Nuvens de pontos coloridos são mais atraentes visualmente e compreensíveis do que as em tons de cinza.
Análise Aprimorada: A cor pode fornecer informações adicionais, como ajudar na análise da vegetação ao distinguir entre diferentes tipos de plantas ou no mapeamento urbano para diferenciar entre várias infraestruturas.
Integração com Outros Conjuntos de Dados: Uma nuvem de pontos coloridos pode ser facilmente integrada a outros conjuntos de dados geoespaciais, oferecendo uma visão abrangente de uma área pesquisada.
Processo Adicional de Fotogrametria: Fotos RGB também podem ser usadas para processamento de fotogrametria, além de coloração de nuvem de pontos.

Trajetória de Voo
A trajetória refere-se ao caminho percorrido por um Veículo Aéreo Não Tripulado (UAV) equipado com um sistema LiDAR durante a coleta de dados. A trajetória é um fator crítico no processamento de dados LiDAR, pois fornece dados de localização para cada ponto da nuvem de pontos. As informações de trajetória são necessárias para georreferenciar dados LiDAR com precisão e produzir modelos 3D precisos da área pesquisada.
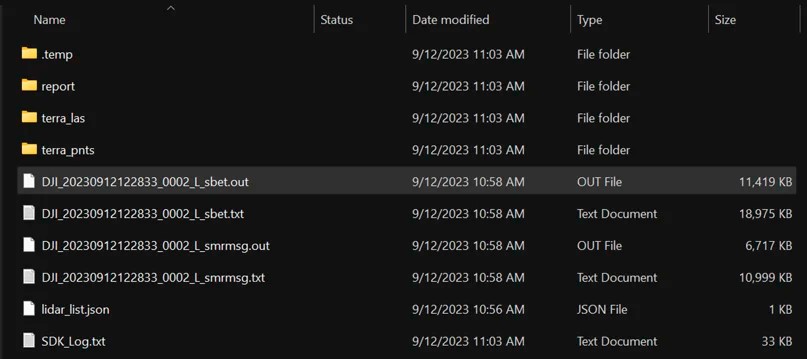
SBET (Melhor Estimativa Suavizada de Trajetória) refere-se a um formato de arquivo pós-processado comumente usado que contém dados GPS e IMU altamente precisos. Este formato do arquivo de trajetória pode ser correlacionado com a nuvem de pontos LAS para posterior pós-processamento. O arquivo de trajetória de pós-processamento da missão LiDAR geralmente é gerado automaticamente junto com o arquivo LAS da nuvem de pontos entregáveis. Ele pode ser importado para software de terceiros para exibição de trajetória.
Ajuste de Faixa
O ajuste de faixa é um procedimento para retificar erros sistemáticos e desalinhamentos em dados LiDAR aerotransportados, especialmente quando coletados em múltiplas faixas de voo. Quando um terreno é levantado usando LiDAR aerotransportado, a área normalmente é coberta por múltiplas faixas ou rotas de voo sobrepostas. A sobreposição é intencional para garantir a continuidade da cobertura e facilitar a correção de erros.
Durante a aquisição de dados LiDAR, vários fatores podem introduzir erros nos dados:
Desvio do Sensor: Com o tempo, o IMU e o GPS podem sofrer leves desvios em suas leituras.
Dinâmica de Voo: Turbulência, mudanças rápidas de altitude e mudanças na orientação da aeronave podem influenciar os dados capturados.
Devido a esses fatores, faixas de voo adjacentes podem, às vezes, apresentar incompatibilidades verticais ou horizontais. Se não forem corrigidos, esses erros podem afetar análises e aplicações subsequentes que dependem dos dados LiDAR.
Benefícios do Ajuste da Faixa:
Consistência de Dados Aprimorada: Reduz incompatibilidades e garante a continuidade nas faixas de voo adjacentes.
Derivados de Maior Qualidade: A qualidade dos produtos derivados, como Modelos Digitais de Elevação (DEMs) e Modelos Digitais de Superfície (DSMs), é aprimorada.
Confiabilidade: Aumenta a confiança na precisão do conjunto de dados LiDAR, tornando-o mais confiável para diversas aplicações, desde mapeamento topográfico até silvicultura.
Processamento de Dados LiDAR Brutos com o Software DJI Terra
O software DJI Terra é o único software compatível usado para processar e exportar os dados brutos da nuvem de pontos LiDAR coletados de um sistema DJI LiDAR no formato LAS universal.
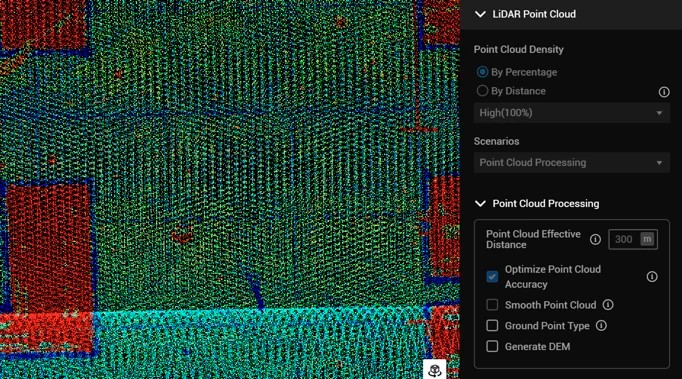
Principais Recursos de Processamento LiDAR no DJI Terra:
Ajustar a Densidade da Nuvem de Pontos: Refere-se ao número de pontos coletados por unidade de área. Este recurso permite ajustar a densidade de pontos para atender às demandas específicas do setor.
Otimizar a Precisão da Nuvem de Pontos: Este recurso usa o algoritmo Strip Locality Preserving Projections (LPP) para minimizar o fenômeno comum de camadas de nuvens de pontos, fazendo com que as nuvens de pontos se alinhem em uma camada mais fina para melhorar a precisão do modelo de nuvem de pontos.
Nuvem de Pontos Suave: Refina a nuvem de pontos filtrando o ruído e reduzindo o impacto dos erros para criar uma representação visual mais suave.
Classificação do Ponto Terrestre: Usado para distinguir pontos terrestres de outros objetos na nuvem de pontos para gerar um Modelo Digital de Elevação (DEM).

Gerar DEM: Este recurso gera um Modelo Digital de Elevação (DEM) formatado em GeoTiFF a partir da nuvem de pontos terrestres classificada.
Verificação e Deslocamento de Precisão Vertical: Verifica a precisão dos dados LiDAR usando pontos de verificação de elevação para garantir que os DEMs ou DTMs derivados sejam representações precisas do solo.
Coordenar a Transformação do Sistema: Permite a fácil transformação de sistemas de coordenadas locais projetadas ou geodésicas para diferentes projetos de mapeamento e levantamento topográfico em todo o mundo.
![]()
Aplicações de LiDAR Aerotransportado
Manejo Florestal
O LiDAR desempenha um papel crucial no manejo florestal, oferecendo uma variedade de aplicações. Pode estimar a altura das árvores, medir a biomassa e mapear a estrutura da floresta. Ao utilizar o LiDAR, os gestores florestais podem obter informações detalhadas sobre a copa da floresta, algo difícil de alcançar com métodos tradicionais de levantamento. Uma das principais vantagens é a capacidade de detectar múltiplos retornos de um único pulso de laser, permitindo “ver através” da vegetação e mapear com precisão a superfície do solo. Essa habilidade torna o LiDAR particularmente útil para estimar a elevação do solo e identificar mudanças na cobertura florestal ao longo do tempo, sendo valioso para monitorar desmatamento e reflorestamento. Além disso, o LiDAR contribui para o desenvolvimento de inventários florestais, essenciais para o manejo florestal sustentável.
Medição Volumétrica
A tecnologia LiDAR proporciona medições precisas para cálculos volumétricos, sendo útil para indústrias como mineração, construção e silvicultura. Por meio de dados de nuvem de pontos LiDAR, é possível calcular com precisão o volume de estoques ou a quantidade de material removido de um local. Essas informações têm aplicações no gerenciamento de estoque, controle de custos e planejamento de recursos.
Levantamento Topográfico
O LiDAR é uma ferramenta eficaz para levantamentos topográficos, mapeando com precisão a forma e as características da superfície terrestre. Diferentemente da fotogrametria, o LiDAR penetra na copa das árvores, capturando medidas precisas da superfície do solo, mesmo em áreas densamente vegetadas. Isso ocorre porque utiliza pulsos de laser para detectar solo e copa, observando as lacunas entre as folhas, resultando em uma melhor detecção do ponto no solo.
Pesquisa Arqueológica
O LiDAR aerotransportado é valioso em pesquisas arqueológicas para mapear extensas e remotas áreas e descobrir estruturas ocultas. O sensor LiDAR penetra na vegetação, capturando dados em alta resolução para identificar estruturas difíceis de visualizar do solo. Essa capacidade auxilia os arqueólogos na compreensão do layout de cidades antigas, assentamentos e atividades humanas passadas.
Inspeção de Rede Elétrica
O LiDAR é utilizado na inspeção de linhas de energia, superando desafios de altura e localização dessas linhas. Com dados de nuvem de pontos LiDAR, é possível criar mapas detalhados das linhas e seus arredores, identificando problemas potenciais, como crescimento de vegetação ou linhas frouxas, que podem causar cortes de energia ou riscos à segurança.
Inspeção de Infraestrutura
Com a capacidade do LiDAR de detectar pequenas imperfeições e rachaduras, muitos o utilizam para escanear estradas e fachadas de edifícios e pontes. Isso auxilia os gerentes de projeto a identificar problemas estruturais que necessitam de atenção imediata, especialmente ao capturar fachadas, onde é crucial implementar um sistema LiDAR direcionado para essa finalidade.
Site oficial DJI: https://enterprise.dji.com/pt-br



