


Mapeamento Autonomo de uma cratera da mina Carrapateena, com a utilização do Hovermap ST-X.
Contexto
A mina Carrapateena, localizada na Austrália, é uma das maiores reservas de cobre do país e do mundo, com uma taxa de produção anual de cerca de 4,25 milhões de toneladas. Adquirida pela OZ Minerals em 2011, a mina passou a integrar a BHP em 2023. A extração do minério é feita pelo método de lavra por subníveis, ideal para corpos de minério extensos e íngremes, com depósitos tabulares ou maciços. Esse método envolve a criação de subníveis no corpo de minério em intervalos verticais regulares, fazendo com que os níveis superiores desmoronem à medida que a mineração avança para baixo. Isso gera subsidência na superfície, formando afundamentos à medida que o solo acima do corpo de minério cede.
A necessidade de monitoramento periódico
Embora o método de lavra por subníveis seja eficiente e econômico, ele exige monitoramento contínuo da subsidência da superfície e da cratera formada para garantir:
- A segurança dos trabalhadores tanto no subsolo quanto na superfície;
- A estabilidade das operações e a continuidade da produção;
- A validação dos modelos geotécnicos e a otimização das perfurações e detonações.
No caso da mina Carrapateena, um cratera com 5 metros de diâmetro apareceu na superfície em 2023 e cresceu significativamente nos meses seguintes. De acordo com o método de lavra, a varredura mensal tornou-se crucial para avaliar a largura e profundidade. Também foi essencial medir a sobrecarga e a elevação do monte de minério para garantir que permanecessem dentro de limites seguros, minimizando o risco de uma explosão de ar causada pelo colapso de uma parede, o que teria consequências catastróficas para os trabalhadores e equipamentos. Esses dados permitiram à equipe geotécnica assegurar que não havia um vazio (espaço de ar) entre o monte de minério e os subníveis, o que, caso fosse identificado, resultaria na imediata paralisação das operações.
O desafio
O projeto enfrentou dificuldades devido à área de interdição, de um raio de 200 metros a partir da cratera, o que impossibilitava a observação direta. Métodos tradicionais, como LiDAR terrestre, sistemas CMS e COW, eram impraticáveis. Drones comuns e helicópteros tripulados só conseguiam capturar a abertura da cratera, sem acessar toda a sua profundidade e largura. Além disso, voar manualmente a maioria dos drones a mais de 200 metros de distância era inviável, especialmente sem linha de visão, link de comunicação ou GPS. A utilização de um LiDAR acoplado a um helicóptero tripulado foi considerada, mas julgada inadequada.
A solução exigia um sistema capaz de realizar a varredura da cratera à uma distância segura, garantindo a captura de informações precisas e detalhadas. A resposta foi encontrada com o drone Matrice 300 com o SLAM Hovermap da Emesent, equipado com LiDAR e câmera, que poderia ser lançado fora da área de interdição, navegar autonomamente até a abertura da cratera, descer e realizar as varreduras com precisão, mesmo sem GPS ou comunicação.
Os requisitos
Carrapateena precisava de uma varredura 3D da cratera para medir sua profundidade, largura, formato e a inclinação do monte de minério na base. Também era necessário obter imagens da cratera, especialmente do fundo, para fornecer informações adicionais à equipe geotécnica. Além disso, era importante estabelecer um programa de monitoramento com um sistema que permitisse capturar facilmente as varreduras mensalmente para:
- Análise da cratera: Medir a largura, profundidade e formato, incluindo a abertura na superfície.
- Avaliação do monte de minério: Avaliar a inclinação e a forma do monte na base da cratera.
- Comparação com o modelo geotécnico: Comparar os dados da varredura com o modelo geotécnico e o minério extraído dos subníveis para detectar anomalias, como espaços vazios entre o monte e os subníveis.
- Otimização das operações de mineração: Ajustar as operações de perfuração e detonação com base na forma do monte de minério, garantindo uma distribuição uniforme de rocha conforme o modelo de projeto.
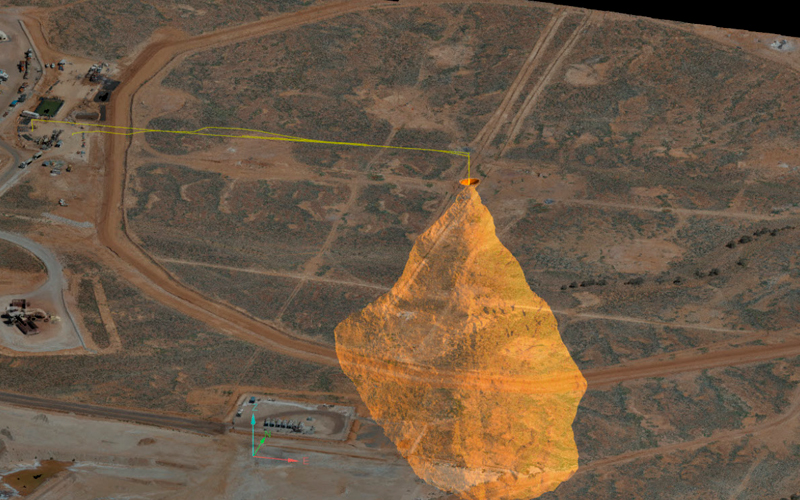
Nuvem de pontos da cratera e trajetória do drone de uma varredura autônoma anterior com o hovermap, sobrepostas a uma imagem aérea da área, destacando o tamanho da cratera e a zona de exclusão.
Tecnologia utilizada:
Componentes de hardware:
- Laser Scanner Hovermap ST-X com LiDAR de alcance de 300m.
- Plataforma de drone DJI M300.
- Controle do drone e tablet Samsung.
- Módulo de rádio de longo alcance Emesent.
- Câmera GoPro.
Software e funcionalidades:
- Emesent Cortex, permitindo voo autônomo além da linha de visão e evitando obstáculos no modo de assistência ao piloto.
- Aplicativo Commander para transmissão ao vivo de nuvens de pontos e operação em tempo real com toque para voar.
- Software de desktop Aura para pós-processamento, visualização de dados e preparação de entregas.
A abordagem
- Decolagem: Iniciou-se o drone em um distância segura, sem colocar em risco o operador, cerca de 300 metros da abertura da cratera.
- Voo: Após iniciar a operação, realizou o voo de forma manual, utilizando o Pilot Assist do Hovermap. Ou seja, o Hovermap criou um escudo de proteção para o drone. Com o rádio de longo alcance do Hovermap, manteve-se a comunicação, possibilitando o monitoramento ao vivo da nuvem de pontos e da câmera.
- Descida: Visualizando a cratera em tempo real, foi criada uma missão de descida com referência na nuvem de pontos. Diante disso, o drone iniciou a descida de forma autônoma, atingindo 70 metros abaixo da superfície.
- Operação autônoma: Com o drone fora da linha de visão, o voo continuou de forma autônoma, mesmo após a perda de comunicação.
- Conclusão: Após encerrar a missão, o drone retornou ao ponto inicial da missão autônoma, recuperando o sinal e atualizando o mapa 3D, o que permitiu a verificação da coleta dos dados.
- Retorno: Quando o escaneamento foi considerado concluído, o drone retornou automaticamente para o ponto de origem.
O escaneamento foi concluído em apenas 15 minutos. Após o pouso, o operador e os engenheiros da mina analisaram o modelo 3D ao vivo no tablet e processaram os dados no Emesent Aura para aumentar a precisão e densidade do escaneamento. Um modelo 3D foi gerado em 25 minutos, pronto para visualização e medição, determinando o tamanho, largura, profundidade, formato e inclinação do monte de minério na cratera. Os dados foram entregues aos engenheiros geotécnicos para análise adicional e integração aos seus sistemas e modelos.
No total, desde a chegada ao local, levou menos de 20 minutos para adquirir um escaneamento inicial de baixa resolução e menos de uma hora para obter o modelo 3D de alta resolução da cratera.
Os resultados
A missão foi um grande sucesso, fornecendo à Carrapateena todos os dados necessários para monitorar e compreender melhor a cratera, incluindo:
- Uma nuvem de pontos 3D precisa e completa.
- Relatório inicial com capturas de tela e dimensões da cratera.
- Vídeo e imagens da GoPro da cratera.
Além disso, foi estabelecido um procedimento simples para escanear a cratera, permitindo à equipe da mina realizar varreduras mensais para monitoramento contínuo.
Principais descobertas
- A cratera Carrapateena era maior do que se esperava, com largura máxima de aproximadamente 187 metros e profundidade de 255 metros.
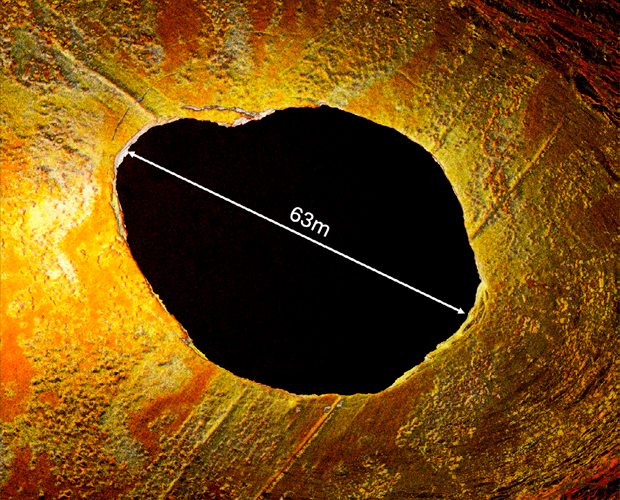
- A abertura da cratera tinha cerca de 63 metros de diâmetro, estendendo-se por aproximadamente 40 metros antes de se alargar.
- Dois fios longos, com aproximadamente 6 metros cada, foram encontrados pendurados na borda da abertura, provavelmente antigos tubos ou fios da superfície. Estes representavam um risco de oscilação e possível colisão com o drone em futuras missões.
- Um escaneamento posterior mostrou que o tamanho da abertura da cratera aumentou significativamente em comparação com o topo do monte de minério, reduzindo bastante o risco de explosão de ar.
Resumo
Este projeto demonstrou o potencial dos sistemas autônomos para executar tarefas perigosas e repetitivas, impactando significativamente a indústria de mineração. Os dados fornecidos pelo Hovermap garantiram a continuidade da produção subterrânea, evitando perdas potenciais de produção que poderiam atingir dezenas de milhões de dólares. Além disso, os dados foram capturados de forma segura, sem riscos para o pessoal, e o monitoramento contínuo detectará anomalias precocemente, garantindo a segurança das operações e dos trabalhadores.
A missão destaca a habilidade única do Hovermap em capturar dados críticos em áreas inacessíveis e desafiadoras, que de outra forma seriam impossíveis de escanear. As capacidades principais do Hovermap — mapeamento SLAM LiDAR e voo autônomo em ambientes sem GPS — foram cruciais para o sucesso.
Veja o vídeo
“A capacidade de monitorar regularmente a cratera Carrapateena representa um evento importante para a redução de riscos nas operações em andamento e permite que o planejamento da mina seja otimizado com segurança para a produção. É um testemunho das capacidades avançadas de autonomia do Hovermap termos conseguido capturar dados críticos para a tomada de decisões que, de outra forma, simplesmente não seriam possíveis.“
— Richard Cheung, Arquiteto de Robótica Digital e Automação, BHP
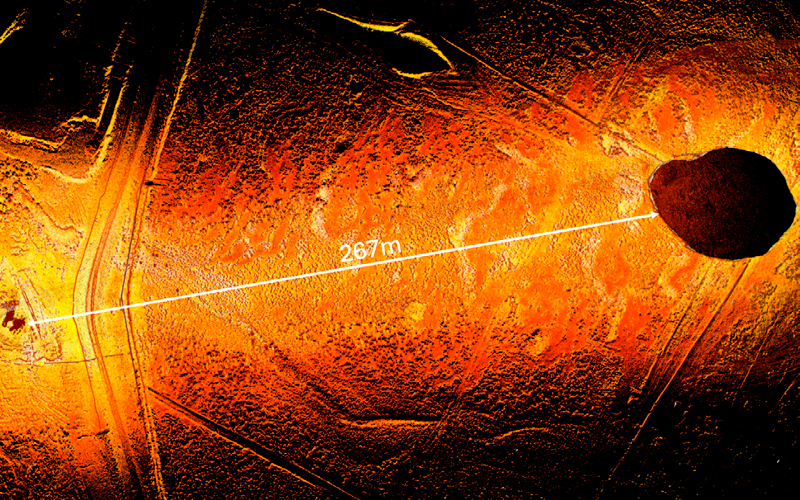
Visão de cima da nuvem de pontos da cratera, destacando o local de lançamento do drone e a abertura da cratera.
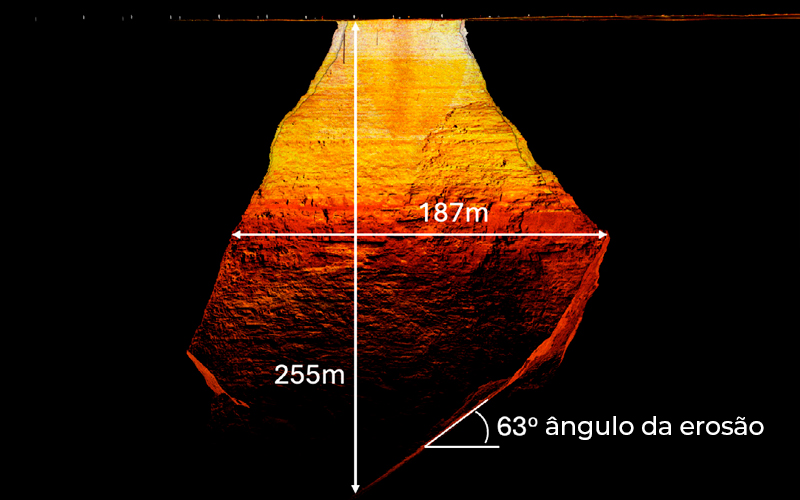
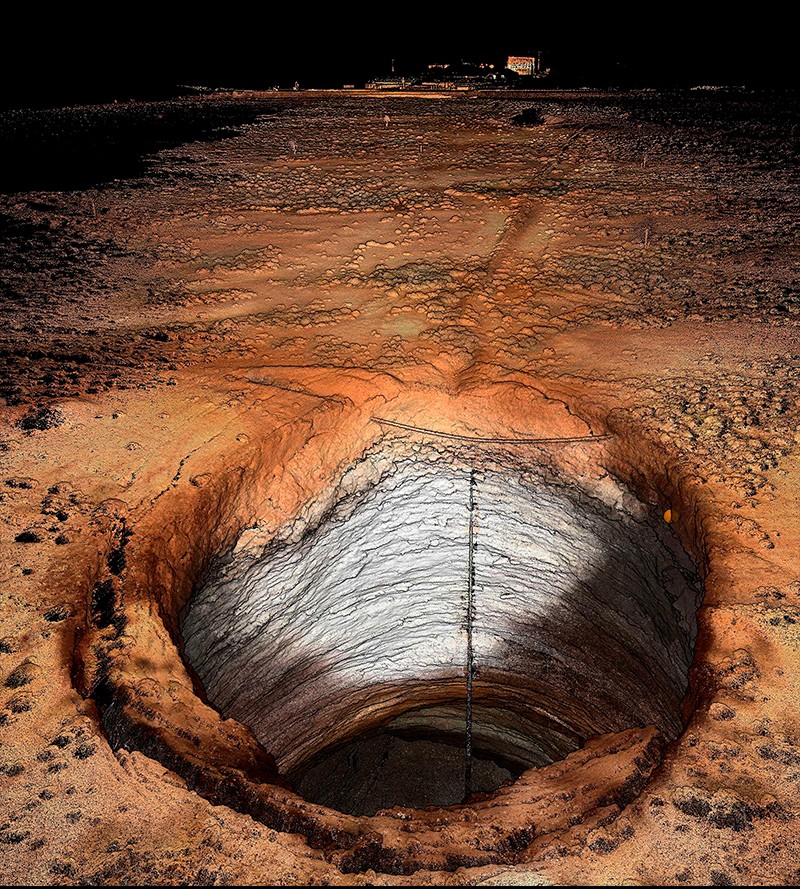
Corte transversal da nuvem de pontos da cratera, mostrando sua profundidade, largura e a inclinação do montante de material.
Sobre a Emesent
A Emesent é líder mundial em autonomia de robôs, mapeamento LiDAR e análise de dados, fundada após uma década de pesquisas de ponta no braço de Robótica e Sistemas Autônomos da Commonwealth Scientific and Industrial Research Organisation (CSIRO). Estabelecida em diversos setores industriais, a empresa colabora com clientes e parceiros para explorar novas possibilidades e inovar em conceitos de prova.
Site do fabricante:https://emesent.com/2024/09/20/mapping-the-carrapateena-megacave-with-hovermap/



